Die Mechanik ist der Zweig der Physik, der sich dem Studium der Bewegung von Körpern widmet. In der Mechanik wird den Fragen nachgegangen, was die Bewegung erzeugt und was sie beeinflusst. Die Kinematik ist ein Teilgebiet der Mechanik und beschäftigt sich "nur" mit der Geometrie der Bewegung eines Körpers, das heißt sie fokussiert sich auf die Position bzw. den Ort, die Beschleunigung und die Geschwindigkeit eines Körpers. ⚽️ 🏹 ⚾️ 🏀
Der Ursprung oder Grund der Bewegung werden im Teilbereich der Kinematik nicht betrachtet. In diesem Modul lernst du demnach, die Gleichungen, die die Bewegung von Objekten bestimmen, mathematisch zu beschreiben. ✏️
Am Ende dieses Modul solltest du:
Die grundlegenden Konzepte der geradlinigen Kinematik kennen und verstehen.
Die Bewegung von Objekten in 2D und 3D mathematisch beschreiben können.
Zusammenhänge zwischen den Bewegungsgleichungen (Weg, Geschwindigkeit, Beschleunigung) beschreiben und verstehen.
Bevor du beginnst, noch kurz einige Infos zum Ablauf: Das Modul ist so aufgebaut, dass du mit dem Eingangstest starten solltest. Als Ergebnis bekommst eine Empfehlung, mit welchem Level der Übungen du in den jeweiligen Themen fortfahren solltest. Du kannst dieser Empfehlung folgen oder aber selber entscheiden welche Inhalte du dir ansehen und welche Übungen du machen möchtest. Zum Schluss solltest du dann den Abschlusstest absolvieren, an dessen Ende dich wiederum ein Feedback erwartet. 🙌
Die Bearbeitunsgdauer für das gesamte Modul kann bis zu 2,5 Stunden betragen. ⌛️ Wirkt das abschreckend? Dann lies besser noch etwas weiter. 😉 Es ist nur eine ungefähre Einschätzung die darauf basiert, dass du dir alle Inhalte ausführlich ansiehst und jede einzelne Rechnung in allen Leveln durchführst. Du entscheidest allerdings frei in welchem Tempo du dir das Modul ansehen und welche Übungen du machen möchtest. Außerdem kannst du das Modul jederzeit verlassen und zurückkommen und dort weitermachen wo du aufgehört hast. ⏯
Du hast weißt nicht so ganz was es mit dem Thema Kinematik überhaupt auf sich hat? Dann starte hier um eine ersten Einblick zu bekommen ⬇⬇⬇
Die Kinematik, auch Bewegungslehre genannt, beschäftigt sich mit zeitlichen und örtlichen Bewegungsabläufen. Dabei werden die Körper auf die wesentlichen Systeme reduziert, d.h. die ursächlichen Kräfte für die Bewegung, Beschleunigung oder Abbremsung werden nicht berücksichtigt. Deshalb werden in der Kinematik Körper als dimensionslose Punkte mit einer Masse m wahrgenommen und folglich als Massepunkte bezeichnet. Die Bewegungsarten der Massepunkte werden eingeteilt in:
Translationsbewegungen (Fortschreitbewegungen, z.B. PKW 🚗 🚙)
Die Bewegungsbahn dieser Bewegungsarten können zum einen geradlinig verlaufen, wie beispielsweise bei einer Eisenbahn 🚂, oder aber krummlinig, wie bei einem Start und dem darauffolgenden Steigflug eines Flugzeuges. ✈️ In den nächsten Abschnitten werden dir diese Bewegungsarten noch detailliert näher gebracht. 🧐
Der nachfolgende Link führt zu einer externen Internetseite, die ggf. andere Datenschutzvorgaben erfüllt als wir es auf dieser Plattform tun. Dabei können Daten von dir übertragen und weiterverarbeitet werden. Wenn du dich allgemein zum Thema Datenschutz erkundigen möchtest, empfehlen wir dir die Erklärvideos der Initiative Datenschutz geht zur Schule.
Um vorab schon einmal einen Eindruck zum Thema Kinematik und Bewegungen zu bekommen, probiere doch mal 👉 diese Simulation 👈 von PhET zu Kräften und Bewegungen aus! Wir empfehlen dir speziell bei der Simulation zum Thema "Beschleunigung" alle Häkchen zu setzen und auf das Zusammenspiel von Beschleunigung & Geschwindigkeit zu achten. 🙌
Geradlinige Kinematik
Um in das Thema geradlinige Bewegungen abtauchen, müssen wir einige grundlegende Konzepte wie bspw. Referenzrahmen und Koordinatensysteme, Positionsvektoren, Parameterdarstellung, verschiedene Geschwindigkeiten und Beschleunigungen klären. 🧐 Dementsprechend siehst du in diesem Abschnitt jede Menge Zwischenüberschriften - lass dich hiervon nicht abschrecken 😉 - alle Unterabschnitte sind für sich genommen sehr kurz! Wir benötigen das Vorwissen um die Konzepte später zu vertiefen. 😏
Referenzrahmen und Koordinatensysteme
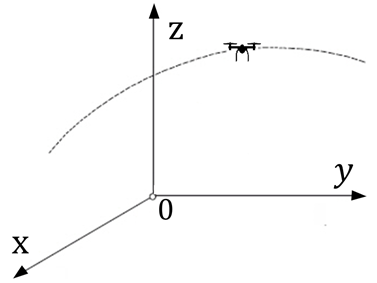
Stell dir vor du nimmst an einem Geomonitoring-Projekt teil, in welchem Drohnen zur Umweltüberwachung eingesetzt werden. Du bist Drohnenpilot:in des Projektes und deine Aufgabe ist es nun, den Flugplan für die
Befliegung zu erstellen. Wie gehst du nun vor ❓
Zunächst wählst du einen Startpunkt im Gelände aus, von welchem die Drohne aus abhebt und zu dem sie zum Landen wieder zurückkehrt. Dieser Punkt ist dein Referenzobjekt, der Ursprung 0 für den Flugplan.
Ausgehend von diesem Punkt legst du dann fest, in welche spezifischen Richtungen die Drohne sich bewegen soll.
Nun stellst du noch andere Parameter wie zum Beispiel die Flughöhe und die Aufnahme der Bilder ein - und schon kannst du mit der Befliegung beginnen!
Über die nachfolgende Slideshow kannst du einen Einblick bekommen, wie so ein Flugplann "in echt" aussieht. Achte dabei einmal darauf, wie die Position der Drohne sich entlang des Flugplans in der Mitte "live" ändert und was du unten rechts aus der Perspektive der Drohne, abhängig von ihrem Ort auf dem Flugplan, erkennen kannst:
Der nachfolgende Link führt zu einer externen Internetseite, die ggf. andere Datenschutzvorgaben erfüllt als wir es auf dieser Plattform tun. Dabei können Daten von dir übertragen und weiterverarbeitet werden. Wenn du dich allgemein zum Thema Datenschutz erkundigen möchtest, empfehlen wir dir die Erklärvideos der Initiative Datenschutz geht zur Schule.
Kommen wir vom
Flugplan der Drohne und dem Thema Geomonitoring wieder zurück zum Thema
gradliniger Kinematik: Wir wissen nun, dass wir, um ein Objekt im Raum
zu lokalisieren, einenBezugsrahmen benötigen und folgendes
festlegen müssen:
Ein Referenzobjekt (Ursprung 0)
Spezifische Richtungen (oder Satz von Achsen x,y,z)
Referenzrahmen und Koordinatensystem von G. Jimenez.
In demselben Bezugssystem können unterschiedliche Koordinatensysteme verwendet werden, d.h. unterschiedliche Möglichkeiten, die Lage der Objektpunkte in Bezug auf den Ursprung und die Achsen anzugeben. Wenn wir doch noch mal zur Drohnen-Befliegung
zurückzukommen, ist es wichtig zu wissen, welches Koordinatensystem die Drohne nutzt und wie man darauf aufbauend die Ergebnisse auswerten und interpretieren kann.
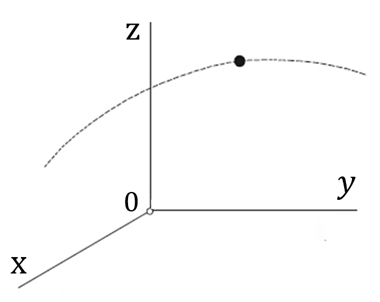
Das System, das wir am häufigsten zur Beschreibung von Bewegung verwenden werden, ist das kartesische Koordinatensystem. Es besteht aus den Achsen x, y und z und ist im nachfolgenden Bild dargestellt. Die anderen beiden wichtigen Koordinatensysteme in drei Dimensionen sind zylindrisch und sphärisch 💡
Kartesische Koordinatensystem von G.Jimenez.
Das System, das wir am häufigsten zur Beschreibung von Bewegung verwenden werden, ist das kartesische Koordinatensystem.
Positionsvektor
Wenn wir einen Punkt zur Darstellung eines Objekts wählen, wird seine Position zu jedem Zeitpunkt durch den Positionsvektor - oder auch Ortsvektor - in einem gegebenen Bezugssystem angegeben. Die Funktion enthält alle Informationen über die Bewegung. Die Funktion ermöglicht es uns, ...
zu wissen, wo sich das Objekt zu einem beliebigen Zeitpunkt in der Vergangenheit befunden hat,
vorherzusagen, wo sich das Objekt zu einem beliebigen Zeitpunkt in der Zukunft befinden wird.
Der Positionsvektor kann durch die drei skalaren Komponenten ausgedrückt werden, die Funktionen der Zeit sind:
Wobei die Einheitsvektoren entlang der drei orthogonalen Richtungen im kartesischen Koordinatensystem sind. 🧐
Positionsvektor im kartesischen Koordinatensystem von G. Jimenez.
Positionsvektor:
Parameterdarstellung
Die Funktionen sind unabhängige Bewegungsbeschreibungen entlang jeder der kartesischen Koordinaten. Wie an dem "t" zu erkennen ist, hängen sie von einer gemeinsamen Variablen, der Zeit ab und werden parametrische Bewegungsgleichungen genannt. Die gemeinsame Variable Zeit wird als Parameter bezeichnet.
Die drei Parametrische Bewegungsgleichungen lauten also:
Flugbahn/ Trajektorie
Um die Beziehung zwischen den Koordinaten zu jedem Zeitpunkt - also unabhängig von der Zeit - auszudrücken, entfernt man den Zeitparameter aus den parametrischen Bewegungsgleichungen , ,
mittels algebraischer Operationen.
Durch das Beispiel des Drohnenfluges zu Beginn hast du bestimmt schon eine Idee was der Flugbahn der Drohne ist, oder ⁉️
In der Physik wird die Trajektorie oder auch Flugbahn eines Körpers durch die geometrischen Orte der aufeinanderfolgenden Positionen des sich bewegenden Körpers beschrieben:
Wenn die Punkte, die der sich bewegende Körper in aufeinanderfolgenden Momenten einnimmt, in einer gekrümmten Linie liegen, wird die Flugbahn als krummlinig bezeichnet. 〰️ Ein Beispiel für einen krummlinigen Verlauf
wäre der Start und der darauffolgenden Steigflug eines Flugzeuges. ✈️
Wenn die Punkte auf einer geraden Linie liegen, wird der Pfad als geradlinig bezeichnet. ➖ Ein Beispiel für den geradlinige Verlauf einer Bewegungsbahn wäre die Bewegung der Eisenbahn. 🚂
⚠️ Wir konzentrieren uns nachfolgend auf die Untersuchung der geradlinigen Bewegung. ⚠️
Trajektorie in einer Ebene:
Position in geradliniger Bewegung
Wenn sich das Objekt auf einem geradlinigen Pfad bewegt, ist es praktisch, den Referenzrahmen so zu wählen, dass eine seiner Achsen (z. B. die x-Achse) mit der Bewegungsrichtung zusammenfällt. 💡 Auf diese Weise hat der Ortsvektor nur eine Komponente:
Wenn wir eine geradlinige Bewegung analysieren, können wir uns die Arbeit also vereinfachen, indem wir den Einheitsvektoraus dem Ortsvektor entfernen und nur mit seiner skalaren Komponente arbeiten. Das gleiche Prinzip der "Vereinfachung" können wir bei anderen vektoriellen Größen wie Verschiebung, Geschwindigkeit und Beschleunigung anwenden.
Dabei versteht es sich, dass ein positiver Wert für die physikalische Größe bedeutet, dass der entsprechende Vektor in Richtung der gewählten positiven Achse zeigt, während ein negativer Wert bedeutet,
dass der Vektor in Richtung der negativen Achse zeigt. Sieh dir dazu auch die nachfolgende Abbildung an. 👀
Konvention von Zeichen bei geradliniger Bewegung von G. Jimenez.
Verschiebung
Wenn deine Position zum Zeitpunkt und deine Position zum Zeitpunkt ist, dann ist der Verschiebungsvektor die Änderung des Positionsvektorsin diesem Zeitintervall.
Verschiebungsdarstellung von G. Jimenez.
Verschiebung, Positionsänderung:
Wichtig ist es, den Unterschied zwischen zurückgelegter Strecke (also dem Weg) und Verschiebung zu beachten!Das folgende Beispiel hilft dabei, diesen Unterschied verständlich zu machen:
Beispiel:
Wenn eine Person zunächst nach rechts und dann nach links zurückgeht, beträgt die in diesem Gesamtzeitintervall zurückgelegte Strecke (also dem Weg) . Die Verschiebung ist allerdings nur , also nur nach rechts.
Zurückgelegte Strecke (skalar): Weglänge
Verschiebung (Vektor): Wie weit und in welche Richtung.
Mittlere Geschwindigkeit
Die mittlere Geschwindigkeit - oder auch Durchschnittsgeschwindigkeit - eines Objekts ist definiert als das Verhältnis des Weges und des verstrichenen Zeitintervalls 🚴♀️ ⏱
Die mittlere Geschwindigkeit beschreibt das globale Verhalten der Bewegung während eines bestimmten Intervalls. Die mittlere Geschwindigkeit wird genutzt, da es nicht sinnvoll ist, die Details zu jedem einzelnen Moment zu beschreiben.
Mittlere Geschwindigkeit:
Momentangeschwindigkeit
Die Momentangeschwindigkeit ist die Geschwindigkeit in einem beliebigen Moment. Spezifischer ausgedrückt, ist die Momentangeschwindigkeit definiert als die Durchschnittsgeschwindigkeit in einem unendlich kurzen Intervall. Genau genommen ist der Limes des Verhältnisses ( , wenn sich
Null nähert, per Definition ist es die zeitliche Ableitung der Position .
Momentangeschwindigkeit:
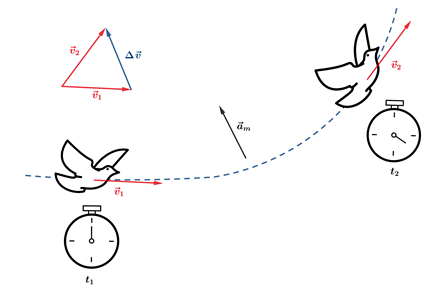
Mittlere Beschleunigung
Die mittlere Beschleunigung - auch durchschnittliche Beschleunigung - eines Objekts während eines bestimmten Zeitintervalls, ist das Verhältnis der Änderung seiner Geschwindigkeit und des Zeitintervalls .
Darstellung der mittleren Beschleunigung von G. Jimenez.
Mittlere Beschleunigung:
Der nachfolgende Link führt zu einer externen Internetseite, die ggf. andere Datenschutzvorgaben erfüllt als wir es auf dieser Plattform tun. Dabei können Daten von dir übertragen und weiterverarbeitet werden. Wenn du dich allgemein zum Thema Datenschutz erkundigen möchtest, empfehlen wir dir die Erklärvideos der Initiative Datenschutz geht zur Schule.
Um das Thema gleichmäßig beschleunigte Bewegung zu behandeln, haben wir dir hier ein super Erklärvideo verlinkt. Das soll dir helfen später den zugehörigen Test am Ende des Kurses zu absolvieren. Na dann leg mal los! ⬇
Beschleunigung und Verzögerung
Wenn die Beschleunigung die gleiche Richtung wie die Geschwindigkeit hat, bedeutet dies, dass ihr absoluter Wert zunimmt und die Bewegung alsbeschleunigt bezeichnet wird. Wenn andererseits die Beschleunigung und die Geschwindigkeit
entgegengesetzte Richtungen haben, bedeutet dies, dass der Absolutwert der Geschwindigkeit abnimmt und die Bewegung verlangsamt wird. Beachte, dass es für eine beschleunigte oder verzögerte Bewegung nicht auf das isolierte Vorzeichen
der Beschleunigung ankommt, sondern darauf, dass die Vektoren und gleiche Vorzeichen (Beschleunigung) und ihr Gegenteil (Verzögerung) haben.
Vergleich von Beschleunigung und Verzögerung von G. Jimenez.
Bewegung mit variabler Beschleunigung
Man findet durch Ableitung und aus der Positionsfunktion die Geschwindigkeit und die Beschleunigung . Der umgekehrte Vorgang ist ebenfalls möglich und besteht darin, durch
Integration die Position bei gegebener Geschwindigkeit oder Beschleunigung zu finden.
Angenommen, die Beschleunigung ist als Funktion der Zeit bekannt. Um die Geschwindigkeit zu erhalten, gehen wir von der Definition der Beschleunigung aus.
Dann finden wir aus der Geschwindigkeit die Position:
Wobei die Konstanten und durch die Anfangsbedingungen bestimmt werden.
Die Integrationstechnik ermöglicht es uns, die geradlinigen kinematischen Gleichungen zu erhalten, wenn die Beschleunigung eine bekannte Funktion der Zeit ist und wenn die Position und Geschwindigkeit zum Anfangszeitpunkt bekannt sind.
Beschleunigung und Anfangsbedingungen bestimmen die Bewegung Ableitung: Integration:
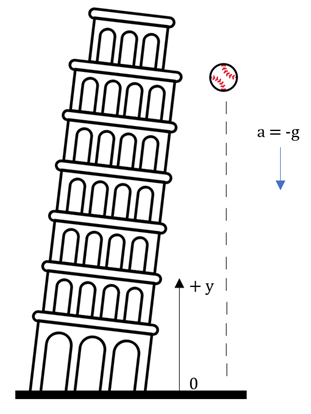
Freier Fall
Eine der interessantesten Anwendungen der Gleichungen für geradlinige Bewegung mit gleichmäßiger Beschleunigung ist der Fall eines frei fallenden Objekts im Gravitationsfeld der Erde. Als der weise Mann Galileo Galilei den Fall von Körpern durch Experimente
untersuchte, kam er zu folgendem Schluss:
„Überall in der Nähe der Erdoberfläche und ohne Luftwiderstand fallen alle Objekte mit der gleichen Beschleunigung“
Und womit hat diese Entdeckung zu tun? 🤔 Galileo beschreibt hier das Phänomen der Erdbeschleunigung, welches die Fallbeschleunigung auf der Erde ist. Die Erdbeschleunigung in der Nähe der Erdoberfläche hat einen ungefähren Wert:
Beachte, dass die Schwerkraft immer nach unten (zum Erdmittelpunkt) zeigt und daher das Vorzeichen der Beschleunigung davon abhängt, welche der beiden Richtungen (oben oder unten) im Koordinatensystem verwendet wird.
Beschleunigungsrichtung im freien Fall mit kartesischem Koordinatensystem von G.Jimenez.
Freier Fall: Bewegung mit Konstante in rechtwinkligen Koordinaten
Als wir die geradlinige Bewegung untersuchten, betonten wir, dass sowohl Verschiebung als auch Geschwindigkeit und Beschleunigung Vektorgrößen sind. Der Vektorcharakter wurde jedoch nicht deutlich, außer wenn wir der Richtung des entsprechenden Vektors auf einer bestimmten Linie ein positives oder negatives Vorzeichen zuwiesen. Unsere reale Welt ist aber (zum Glück 😉) dreidimensional und um Bewegungen in zwei oder drei Dimensionen zu beschreiben, müssen wir berücksichtigen, dass die physikalischen Größen notwendigerweise eine Richtung und Bedeutung im Raum haben 📝.
In diesem Abschnitt analysieren wir, wie im Fall der eindimensionalen Bewegung, die Vektorgleichungen für die Bewegung in zwei und drei Dimensionen lautet, ausgehend von den Definitionen von Verschiebung, Geschwindigkeit und Beschleunigung. Wir betrachten dabei den Spezialfall der Bewegung mit konstanter Beschleunigung, die in einer Ebene auftritt, und insbesondere die Bewegung von Projektilen ↖️⚾️💨 , deren parabelförmige Trajektorie sehr leicht zu analysieren ist, weil sie sich die Unabhängigkeit der horizontalen ➡️ und vertikalen ⬆️ Bewegung zunutze macht.
Vektorposition
Die relative Position eines Objekts in Bezug auf ein Bezugssystem wird durch den Positionsvektor oder durch den Vektor angegeben. Dieser erstreckt sich vom Ursprung bis zum repräsentativen Punkt des Objekts.
In einem kartesischen Koordinatensystem ist der Positionsvektor:
Wobei die jeweiligen Einheitsvektoren sind.
Vektorposition von N. Donner.
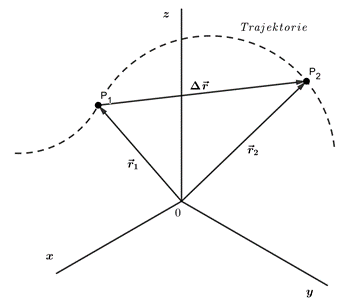
Verschiebungsvektor
Während eines Delta-Zeitintervalls t ist die Verschiebung des Objekts die Differenz der beiden entsprechenden Positionsvektoren:
In kartesischen Koordinaten hat der Verschiebungsvektor die Verschiebungen auf jeder der Achsenals Komponenten.
Verschiebungsvektor von N. Donner
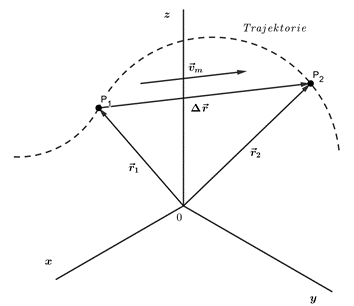
Mittlere Geschwindigkeit
Der mittlere Geschwindigkeitsvektor während eines Zeitintervalls, , ist definiert als der Quotient aus dem Verschiebungsvektor und dem Zeitintervall:
In kartesischen Koordinaten hat die Durchschnittsgeschwindigkeit die Geschwindigkeiten auf jeder der Achsen als Komponenten.
Mittlere Geschwindigkeit von N. Donner.
Durchschnittsgeschwindigkeit:
Momentangeschwindigkeit
Der Momentangeschwindigkeitsvektor ist die Grenze der Durchschnittsgeschwindigkeit, wenn das Zeitintervall Delta t gegen Null geht:
Die Momentangeschwindigkeit ist also die Ableitung des Ortsvektors nach der Zeit. Wenn wir in kartesischen Koordinaten arbeiten, sind die Komponenten des Geschwindigkeitsvektors folgende:
Der momentane Geschwindigkeitsgröße ist:
Momentangeschwindigkeit von N. Donner.
Die sofortige Geschwindigkeit is tangential zur Trajektorie. kartesische Komponenten:
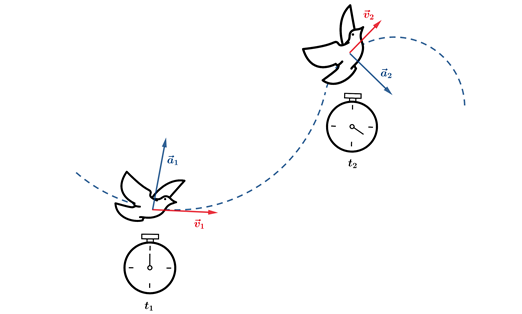
Durchschnittliche \ Mittlere Beschleunigung
Der Geschwindigkeitsvektor kann während der Bewegung variieren. Der mittlere Beschleunigungsvektor am ist definiert als der Quotient aus der Variation des Geschwindigkeitsvektors und dem Zeitintervall
Beachte, dass der mittlere Beschleunigungsvektor die gleiche Richtung wie der hat.
Mittlere Beschleunigung von N. Donner
Die Beschleunigung geht in die gleiche Richtung wie die momentane Geschwindigkeitsänderung. \\ sind parallel
Momentanbeschleunigung
Betrachtet man ein unendlich kleines Zeitintervall, so ist der momentane Beschleunigungsvektor als Ableitung des Geschwindigkeitsvektors nach der Zeit definiert.
In kartesischen Koordinaten ist jede Komponente des Vektors die Ableitung der entsprechenden Geschwindigkeitskomponente :
Der Geschwindigkeitsvektor kann in Größe, Richtung oder beidem variieren. In jedem dieser Fälle gibt es eine Beschleunigung. Wenn nur der Größe von variiert, ist die Bewegung geradlinig. Ein Objekt kann den Betrag seiner Geschwindigkeit konstant halten und dennoch beschleunigt werden. Dies geschieht in der gleichförmigen Kreisbewegung, die wir im nächsten Kapitel untersuchen werden.
Momentanbeschleunigung von N. Donner.
ist tangential zur Trajektorie. zeigt auf die konkave Seite.
Bewegungsgleichung:
Die Funktion enthält alle Informationen über die Bewegung. Wenn wir kennen, können wir durch sukzessive Differentiation direkt die Geschwindigkeit und die Beschleunigung finden.
;
Umgekehrt, wenn wir die Beschleunigung als Funktion der Zeit und die Anfangsbedingungen kennen, können wir durch sukzessive Integration die Geschwindigkeit und das ls der Bewegung finden.
;
Bewegungsgleichungen und ihre Beziehungen: Ableitung: Integration:
Konstante Beschleunigung .
Ein Fall von besonderer Bedeutung ist der einer konstanten Beschleunigung (sowohl in der Größe als auch in der Richtung). Integrieren wir den Ausdruck ), die Geschwindigkeit ergibt sich nach einer Zeit :
Wobei die Geschwindigkeit zum Anfangszeitpunkt ist.
Konstante Beschleunigung (Vektordarstellung) von N. Donner.
Konstante Beschleunigung:
Ähnlich, wenn wir die Beziehung integrieren und den obigen Ausdruck für und Terme von verwenden:
Wenn der Positionsvektor zum Anfangszeitpunkt ist, gilt zu jedem Zeitpunkt:
Nach diesem Ausdruck die Verschiebung . Es ist eine Kombination aus zwei Vektoren: einer parallel zu und der andere parallel zu . Daher ist die Bewegung in 3D mit konstanter Beschleunigung auf die Ebene beschränkt, die durch die Vektoren und gebildet wird.
Bewegung in einer Ebene für konstante Beschleunigung von N. Donner
Wenn konstant ist, erfolgt die Bewegung in einer Ebene.
Bewegungsgleichung in einer Ebene für konstante Beschleunigung:
Da wir das Koordinatensystem frei wählen können, so dass die Vektorgleichung auf zwei Skalare reduziert wird, genügt es, die xy-Ebene mit der Ebene zusammenfallen zu lassen, in der die Trajektorie liegt (Ebene gebildet durch und . Wir erhalten also die skalaren Gleichungen für die Bewegung in - und -Richtung.
Die Bewegungen in und Richtung sind simultan, aber unabhängig. Das bedeutet beispielsweise, dass die Positionsänderung allein durch die Beschleunigung und die Anfangsgeschwindigkeit bestimmt wird. Daher sind die Gleichungen für jede Komponente identisch mit denen einer eindimensionalen Bewegung mit konstanter Beschleunigung. Dies ist ein wichtiger Punkt, der die Fehlersuche erleichtert.
Bewegung mit Konstante in rechtwinkligen Koordinaten:
Möglichkeiten dein neues Wissen zu Bewegung in zwei und drei Dimensionen zu testen, findest du unter dem nächsten Abschnitt zu "Projektilbewegungen". 🔽
Projektilbewegung (Wurfbewegung) 🤾♀️
Wie im Abschnitt zu 2D und 3D Bewgeung bereits angekündigt, widmen wir uns in diesem Abschnitt dem Spezialfall der Projektil- oder auch Wurfbewegungen. 👀
Ein Projektil ist ein Objekt, das in die Luft geworfen wird und sich frei bewegen kann. ↖️⚾️💨
Angenommen, ein Projektil wird mit einer Anfangsgeschwindigkeit in einem Winkel zur Horizontalen auf ebenem Boden abgefeuert.
Projektilbewegung (Vektordarstellung) von N. Donner.Dann können wir die Projektilbewegung als Überlagerung zweier unabhängiger Bewegungen und somit als Bewegungsüberlagerungbetrachten.
Eine gleichförmige Bewegung in
Bewegung in Vektor-Richtung, die aufgrund der Schwerkraft einer nach unten gerichteten Beschleunigung ausgesetzt ist
Wir haben unsere Koordinaten so gewählt, dass der Ursprung 0 der Koordinaten im Abschusspunkt liegt und die Achse senkrecht nach oben zeigt. Nun schreiben wir die Koordinaten zum Zeitpunkt .
--- (1)
--- (2)
Vektorzerlegung in Projektilbewegung. N. Donner
Anfangsbedingungen:
Trajektorie: Der Ausdruck der Trajektorie y(x) wird erhalten, indem die Zeit von Gleichung (1) gelöscht und in (2) eingesetzt wird.
Die Kurve, die die Bahngleichung eines Projektils darstellt, stellt sich als Parabel heraus.
Trajektorie (Parabel):
Flugzeit: Gesamtflugzeit wird ermittelt, indem gesetzt wird.
Flugzeit:
Horizontale Reichweite: Die während der Flugzeit t zurückgelegte horizontale Gesamtstrecke beträgt:
Horizontale Reichweite:
Maximale Höhe: Der maximale Punkt der Trajektorie y=H ist der Punkt, an dem die vertikale Komponente der Geschwindigkeit aufgehoben wird:
Maximale Höhe:
Praktische Anwendung:
Das war ganz schön viel Theorie auf einmal oder? 😲 Dafür geht's nun zum praktischen Verständnis über. 🤗
Zunächst haben wir einen LearningSnack entworfen, der dir - ganz "nebenbei" - etwas über Wurfbewegungen vermittelt. Und wie der Name schon sagt, kannst du die Inhalte in kleinen Häppchen "snacken". 🍴 Guten Appetit! 😋
Der nachfolgende Link führt zu einer externen Internetseite, die ggf. andere Datenschutzvorgaben erfüllt als wir es auf dieser Plattform tun. Dabei können Daten von dir übertragen und weiterverarbeitet werden. Wenn du dich allgemein zum Thema Datenschutz erkundigen möchtest, empfehlen wir dir die Erklärvideos der Initiative Datenschutz geht zur Schule.
Um zum LearningSnack zu gelangen, musst du einfach nur den QR-Code scannen oder👉 hier klickenund schon wirst du in einen virtuellen Chat geschmissen. Los geht's! ⬇️
Und wenn du noch weiter in die Praxis eintauchen willst, dann empfehlen wir dir die nachfolgende Simulation von PhET. Die interaktiven Komponenten werden dir dabei helfen, dein Wissen in der Praxis anzuwenden! 🧠
Der nachfolgende Link führt zu einer externen Internetseite, die ggf. andere Datenschutzvorgaben erfüllt als wir es auf dieser Plattform tun. Dabei können Daten von dir übertragen und weiterverarbeitet werden. Wenn du dich allgemein zum Thema Datenschutz erkundigen möchtest, empfehlen wir dir die Erklärvideos der Initiative Datenschutz geht zur Schule.
Klicke 👉 hier, um auf die Simulation über Projektilbewegung zuzugreifen. ⚾️💨 Probiere in der Einführung einmal aus, welche Gegenstände sich aus der Kanone abfeuern lassen und wie sich ihre Flugbahnen unterscheiden. Wenn du es ganz genau wissen willst, kannst du dir sogar die Geschwindigkeits- und Beschleunigungsvektoren anzeigen lassen. Versuche bereits vor dem Abfeuern der Kanone, mit dem Wissen was du hier gesammelt hast, hervorzusagen was passieren wird und überprüfe dann deine Voraussage. 🔎
") zur Darstellung eines Objekts wählen, wird seine Position zu jedem Zeitpunkt durch den Positionsvektor
zur Darstellung eines Objekts wählen, wird seine Position zu jedem Zeitpunkt durch den Positionsvektor ") - oder auch Ortsvektor - in einem gegebenen Bezugssystem angegeben. Die Funktion
- oder auch Ortsvektor - in einem gegebenen Bezugssystem angegeben. Die Funktion ") enthält alle Informationen über die Bewegung.
enthält alle Informationen über die Bewegung. = \vec{x}(t)\widehat{x} +\vec{y}(t)\widehat{y}+\vec{z}(t)\widehat{z}")
 die Einheitsvektoren entlang der drei orthogonalen Richtungen im kartesischen Koordinatensystem sind. 🧐
die Einheitsvektoren entlang der drei orthogonalen Richtungen im kartesischen Koordinatensystem sind. 🧐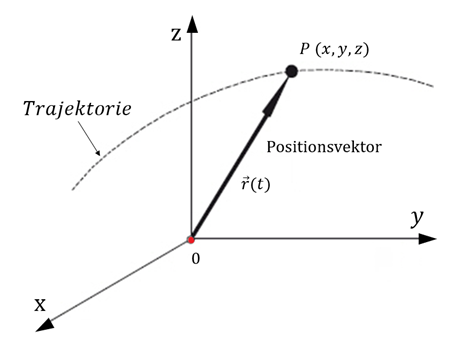
=x(t)\widehat{x}+y(t)\widehat{y}+z(t)\widehat{z}")
, y(t), z(t)") sind unabhängige Bewegungsbeschreibungen entlang jeder der kartesischen Koordinaten. Wie an dem "t" zu erkennen ist, hängen sie von einer gemeinsamen Variablen, der Zeit
sind unabhängige Bewegungsbeschreibungen entlang jeder der kartesischen Koordinaten. Wie an dem "t" zu erkennen ist, hängen sie von einer gemeinsamen Variablen, der Zeit  ab und werden parametrische Bewegungsgleichungen genannt. Die gemeinsame Variable Zeit wird als Parameter bezeichnet.
ab und werden parametrische Bewegungsgleichungen genannt. Die gemeinsame Variable Zeit wird als Parameter bezeichnet.") ,
, ") ,
, ") mittels algebraischer Operationen.Durch das Beispiel des Drohnenfluges zu Beginn hast du bestimmt schon eine Idee was der Flugbahn der Drohne ist, oder ⁉️
mittels algebraischer Operationen.Durch das Beispiel des Drohnenfluges zu Beginn hast du bestimmt schon eine Idee was der Flugbahn der Drohne ist, oder ⁉️")
=x(t)\widehat{x}")
 aus dem Ortsvektor entfernen und nur mit seiner skalaren Komponente
aus dem Ortsvektor entfernen und nur mit seiner skalaren Komponente") arbeiten. Das gleiche Prinzip der "Vereinfachung" können wir bei anderen vektoriellen Größen wie Verschiebung, Geschwindigkeit und Beschleunigung anwenden.
arbeiten. Das gleiche Prinzip der "Vereinfachung" können wir bei anderen vektoriellen Größen wie Verschiebung, Geschwindigkeit und Beschleunigung anwenden.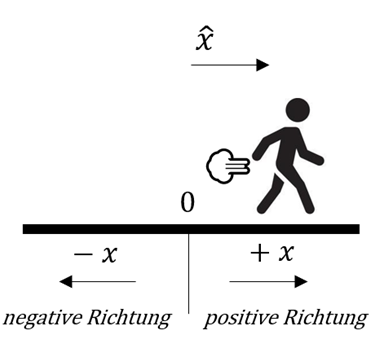
 deine Position zum Zeitpunkt
deine Position zum Zeitpunkt  und
und  deine Position zum Zeitpunkt
deine Position zum Zeitpunkt ist, dann ist der Verschiebungsvektor die Änderung des Positionsvektors in diesem Zeitintervall.
ist, dann ist der Verschiebungsvektor die Änderung des Positionsvektors in diesem Zeitintervall.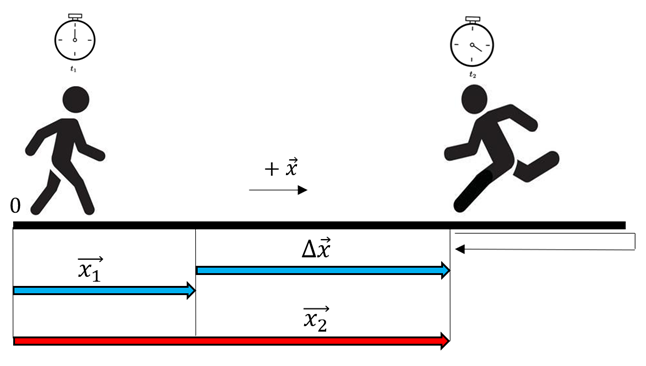
 \widehat{x}")
 nach rechts und dann
nach rechts und dann  nach links zurückgeht, beträgt die in diesem Gesamtzeitintervall zurückgelegte Strecke (also dem Weg)
nach links zurückgeht, beträgt die in diesem Gesamtzeitintervall zurückgelegte Strecke (also dem Weg)  . Die Verschiebung ist allerdings nur
. Die Verschiebung ist allerdings nur  , also nur
, also nur  nach rechts.Zurückgelegte Strecke (skalar): WeglängeVerschiebung (Vektor): Wie weit und in welche Richtung.
nach rechts.Zurückgelegte Strecke (skalar): WeglängeVerschiebung (Vektor): Wie weit und in welche Richtung.
 ist die Geschwindigkeit in einem beliebigen Moment. Spezifischer ausgedrückt, ist die Momentangeschwindigkeit definiert als die Durchschnittsgeschwindigkeit in einem unendlich kurzen Intervall. Genau genommen ist
ist die Geschwindigkeit in einem beliebigen Moment. Spezifischer ausgedrückt, ist die Momentangeschwindigkeit definiert als die Durchschnittsgeschwindigkeit in einem unendlich kurzen Intervall. Genau genommen ist ") , wenn sich
, wenn sich
 Null nähert, per Definition ist es die zeitliche Ableitung der Position
Null nähert, per Definition ist es die zeitliche Ableitung der Position  .Momentangeschwindigkeit:
.Momentangeschwindigkeit:![\vec{v} = lim_{\Delta t \to 0}[ \frac {\Delta \vec{x} }{\Delta{t} }] = \frac{d \vec{x} }{dt}](https://moodle.thga.de/filter/tex/pix.php/f576d869e26249d82c9d5a4ad0298a3f.png "\vec{v} = lim_{\Delta t \to 0}[ \frac {\Delta \vec{x} }{\Delta{t} }] = \frac{d \vec{x} }{dt}")
 und des Zeitintervalls
und des Zeitintervalls 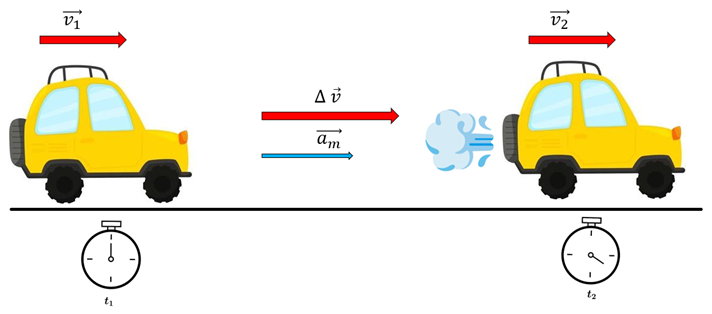

 und
und 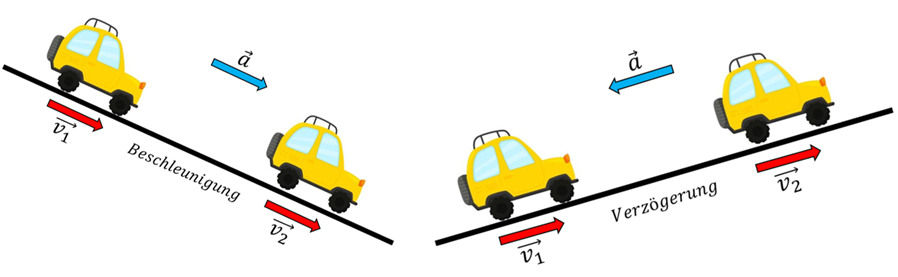
") die Geschwindigkeit
die Geschwindigkeit ") und die Beschleunigung
und die Beschleunigung ") . Der umgekehrte Vorgang ist ebenfalls möglich und besteht darin, durch
Integration die Position bei gegebener Geschwindigkeit oder Beschleunigung zu finden.
. Der umgekehrte Vorgang ist ebenfalls möglich und besteht darin, durch
Integration die Position bei gegebener Geschwindigkeit oder Beschleunigung zu finden.= \frac{dv}{dt} \Rightarrow v(t)= \int_{}^{}{a(t)dt} +C_1")
= \frac{dx(t)}{dt} \Rightarrow x(t)= \int_{}^{}{v(t) dt} +C_2")
 und
und  durch die Anfangsbedingungen bestimmt werden.
durch die Anfangsbedingungen bestimmt werden. \Rightarrow v=\frac{dx}{dt} \Rightarrow a=\frac{dv}{dt}")
 \Rightarrow v(t)= \int_{}^{}{a.dt} \Rightarrow x(t)= \int_{}^{}{v.dt}")

 davon abhängt, welche der beiden Richtungen (oben oder unten) im Koordinatensystem verwendet wird.
davon abhängt, welche der beiden Richtungen (oben oder unten) im Koordinatensystem verwendet wird.


={y_0}+{v_0._y}t+\frac{1}{2}{a_y}t^2")
 angegeben. Dieser erstreckt sich vom Ursprung
angegeben. Dieser erstreckt sich vom Ursprung  bis zum repräsentativen Punkt
bis zum repräsentativen Punkt  des Objekts.
des Objekts.") ist der Positionsvektor:
ist der Positionsvektor:
") die jeweiligen Einheitsvektoren sind.
die jeweiligen Einheitsvektoren sind.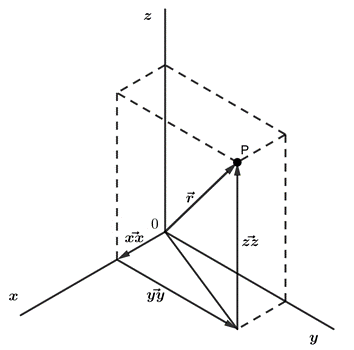

 \widehat{x}+(y_2-y_1) \widehat{y}+(z_2-z_1) \widehat{z}")

 , ist definiert als der Quotient aus dem Verschiebungsvektor und dem Zeitintervall:
, ist definiert als der Quotient aus dem Verschiebungsvektor und dem Zeitintervall:


![| \vec{v}|= \sqrt[2]{v_x^2+v_y^2+v_z^2}](https://moodle.thga.de/filter/tex/pix.php/521721db2eef7ff4fd4466d374c4edb2.png "| \vec{v}|= \sqrt[2]{v_x^2+v_y^2+v_z^2}")

 am ist definiert als der Quotient aus der Variation des Geschwindigkeitsvektors
am ist definiert als der Quotient aus der Variation des Geschwindigkeitsvektors 
 sind parallel
sind parallel![\vec{a} = lim_{\Delta t \to 0}[ \frac {\Delta \vec{v} }{\Delta{t} }] = \frac{d \vec{v} }{dt}=\frac{d^2 \vec{r}}{dt^2}](https://moodle.thga.de/filter/tex/pix.php/bad7599087782c8c0c27d8aa9df3020d.png "\vec{a} = lim_{\Delta t \to 0}[ \frac {\Delta \vec{v} }{\Delta{t} }] = \frac{d \vec{v} }{dt}=\frac{d^2 \vec{r}}{dt^2}")
") die Ableitung der entsprechenden Geschwindigkeitskomponente
die Ableitung der entsprechenden Geschwindigkeitskomponente ") :
:
}{dt}") ;
; }{dt}")
dt}") ;
; dt}") Bewegungsgleichungen und ihre Beziehungen:
Bewegungsgleichungen und ihre Beziehungen: \Rightarrow \vec{v}=\frac{d\vec{r}}{dt} \Rightarrow \vec{a}= \frac{d\vec{v}}{dt}")
 \Rightarrow \vec{v}= \int_{}^{}{\vec{a}dt} \Rightarrow \vec{r} = \int_{}^{}{\vec{v}dt}")
 ), die Geschwindigkeit
), die Geschwindigkeit  :
:
 die Geschwindigkeit zum Anfangszeitpunkt
die Geschwindigkeit zum Anfangszeitpunkt  ist.
ist.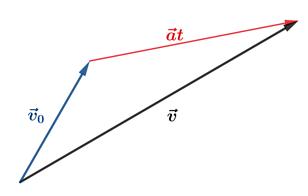
=\vec{v_0} +\vec{a}t")
 integrieren und den obigen Ausdruck für
integrieren und den obigen Ausdruck für dt}")
 der Positionsvektor zum Anfangszeitpunkt ist, gilt zu jedem Zeitpunkt:
der Positionsvektor zum Anfangszeitpunkt ist, gilt zu jedem Zeitpunkt:=\vec{r_0}+\vec{v_0}t+\frac{1}{2}\vec{a}t^2")
}") . Es ist eine Kombination aus zwei Vektoren: einer parallel zu
. Es ist eine Kombination aus zwei Vektoren: einer parallel zu 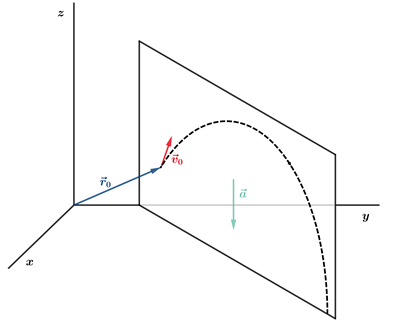
 . Wir erhalten also die skalaren Gleichungen für die Bewegung in
. Wir erhalten also die skalaren Gleichungen für die Bewegung in  - und
- und  -Richtung.
-Richtung. und
und  Richtung sind simultan, aber unabhängig. Das bedeutet beispielsweise, dass die Positionsänderung
Richtung sind simultan, aber unabhängig. Das bedeutet beispielsweise, dass die Positionsänderung  und die Anfangsgeschwindigkeit
und die Anfangsgeschwindigkeit  bestimmt wird. Daher sind die Gleichungen für jede Komponente identisch mit denen einer eindimensionalen Bewegung mit konstanter Beschleunigung. Dies ist ein wichtiger Punkt, der die Fehlersuche erleichtert.Bewegung mit Konstante
bestimmt wird. Daher sind die Gleichungen für jede Komponente identisch mit denen einer eindimensionalen Bewegung mit konstanter Beschleunigung. Dies ist ein wichtiger Punkt, der die Fehlersuche erleichtert.Bewegung mit Konstante
={x_0}+{v_0._x}t+\frac{1}{2}{a_x}t^2")
 zur Horizontalen auf ebenem Boden abgefeuert.
zur Horizontalen auf ebenem Boden abgefeuert.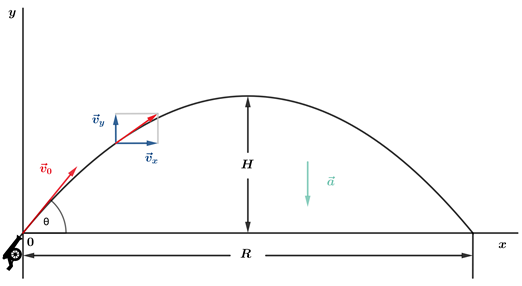


 Achse senkrecht nach oben zeigt. Nun schreiben wir die Koordinaten
Achse senkrecht nach oben zeigt. Nun schreiben wir die Koordinaten ") zum Zeitpunkt
zum Zeitpunkt =v_0.cos( \theta ).t") --- (1)
--- (1)=(v_0.sin( \theta)).t -\frac{1}{2}.g.t^2") --- (2)
--- (2)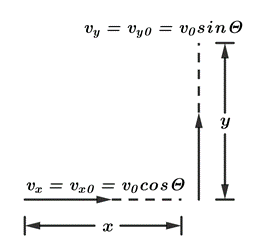

")
")
= tan ( \theta ).x-\frac{g.x^2}{2.(v_0cos( \theta ))^2}")
=0") gesetzt wird.
gesetzt wird.)t-\frac{1}{2}g.t^2 \Rightarrow t=\frac{2v_0.sin( \theta) }{g}") Flugzeit:
Flugzeit: }{g}")
 \frac{2v_0 .sin( \theta )}{g} =\frac{2v_0^2sen(2 \theta) }{g}") Horizontale Reichweite:
Horizontale Reichweite: }{g}")
) ^2}{2g}") Maximale Höhe:
Maximale Höhe: ^2}{2g}")
